The following setup is a result of reading forums and a lot of my own experimentation. I recommend it for anyone who is learning to hover or learning slow forward flight. I recommend it be used for indoor flying only or outdoor on a very still day.
Mechanical SetupI basically use the factory setup of the Blade 400. I currently use fiberglass blades. But I get the same results with the wooden blades. The only difference I can think of is
lubrication.

For the belt, I use RC car shock oil. This was suggested in one of the forums. It's a bit messy sometimes, and I'm not really that sure if it helps, but I put it on my belt every dozen or so flights. The other recommended option is silicone spray.
The next (not so) secret ingredient is Triflow. This definitely helps. I put it on all moving parts. The head setup, tail rotor, everything! It just works beautifully. It makes everything slide nice and smooth. It costs about AUD $8 for 2 fl oz. If you can't find this in your local hobby shop, try the bike shops. That's where I got mine.
DX6i Throttle CurveI've decided to use F-mode for all my custom settings. This way, I can test how my settings compare against the default factory normal mode settings. Later, when I start doing 3D flying, I might swap them over completely.
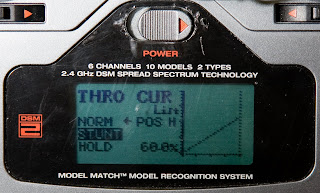
I use a linear curve from 0 to 60%.
That is:
Position L = 0%
Position 2 = 15%
Position 3 = 30%
Position 4 = 45%
Position H = 60%
The rationale is that the slower the head speed, the less power it will consume. Now, I've read in the forums that the motor runs most efficiently at 80% throttle. But I found this not to be the case on mine. I tried running a linear curve to 100% and 80%. Both gave me less flying time. I also tried running lower at 50%. But that barely got it off the ground. And it looked like the motor was being burdened too much by the pitch.
With the 60% linear curve, it will allow you to hover at 1 line above mid-stick. Which I think is the ideal position in preparation for 3D flying.
DX6i Pitch CurveI got the idea from one of the forums. But I added my own little adjustments. I am using the following settings:
Position L = 35%
Position 2 = 55%
Position 3 = 70%
Position 4 = 85%
Position H = 100%
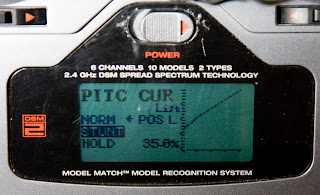
The almost exponential-looking curve for 2,3,4,H, give you a very forgiving throttle/pitch response around mid-stick. With these values, you're sure the heli won't jump up or drop down even if you over-correct slightly. The lower Position L is my own addition. It gives you the negative pitch you need when you want to get the heli quickly to the ground. I didn't originally have this setting but found that during "emergencies" the heli just won't go down quick enough. With this, you still have good panic response. =)
DX6i Dual Rates and ExpoAgain, I use F-mode for my custom settings. So, remember to turn on the switches when you program these in:
AILE 100% +10%
ELEV 100% +10%
RUDD 100% INH
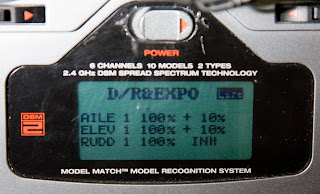
The +10% expo makes the cyclics a bit more forgiving around the neutral position. At first, I didn't like these settings. Because the response felt delayed. I even tried negative expo. However, I found myself over-controlling too much. The heli didn't fly very nicely. With these settings it makes the heli fly like I'm in control. =)

Well that's about it. Use the settings above, and you should get anything between 12 and 16 minutes of flying time. Remember to only use these indoor or outside on a windless day. Otherwise, the heli will just be too underpowered to be controllable in the wind. If you have any comments or suggestions, please feel free to leave me a message. I hope it helps. Enjoy!






























